

import anon.conf
anon.conf.config.update('jax_disable_jit', True)
import anon
import jax
import anon.atom as anp
import elle.sections
import elle.beam2d
import elle.springs
import emme as em
mat = elle.springs.isokin.no1(60.0,29e3)
# mat = elle.springs.gmp.no5(60.0,29e3)
sec = elle.sections.core_v2.Rectangle
geom_template = elle.beam2d.transform_no2(elle.beam2d.geom_no1)
beam_template = elle.beam2d.resp_no6An Assembler is an object with an .assemble() and optionally a .compose() method
# Create a model Assembler
model = em.SkeletalModel(ndm=2,ndf=3)
# Define problem parameters
P1 = model.param("P1")
# Define model components
girder_section = sec(d=60.0, b=18.0,mat=mat).assemble()
column_section = sec(d=60.0, b=18.0,mat=mat).assemble()
basic_girder = beam_template(*[girder_section]*8, quad={"n": 8, "rule": "mid"})
basic_column = beam_template(*[column_section]*8, quad={"n": 8, "rule": "mid"})
girder = geom_template(basic_girder)
column = geom_template(basic_column)# Set up nodes
ft = 12
B, H = 30.*ft, 13.*ft
model.node("1", 0., 0.)
model.node("2", 0., H )
model.node("3", B/2, H )
model.node("4", B , H )
model.node("5", B , 0.)
model.beam("a", "1", "2", elem=column)
model.beam("b", "2", "3", elem=girder)
model.beam("c", "3", "4", elem=girder)
model.beam("d", "4", "5", elem=column)
model.boun("1", [1,1,1])
model.boun("5", [1,1,1])
model.load("2", P1, dof="x")
model.load("2", -1.0, dof="y")
model.load("2", -1.0, dof="y")
em.plot_structure(model);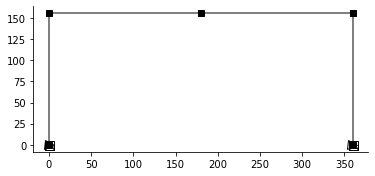
f = model.compose()f(1.0)[[ 1.63539291e-02]
[-2.02570246e-03]
[-9.55256367e-05]
[ 1.50486513e-02]
[-2.12649699e-03]
[ 4.89535361e-05]
[ 1.37433735e-02]
[-3.81704943e-04]
[-7.50191192e-05]]
DeviceArray([[ 1.63539291e-02],
[-2.02570246e-03],
[-9.55256367e-05],
[ 1.50486513e-02],
[-2.12649699e-03],
[ 4.89535361e-05],
[ 1.37433735e-02],
[-3.81704943e-04],
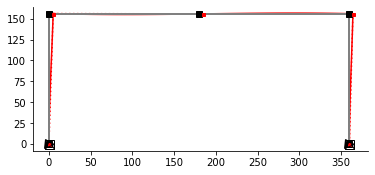
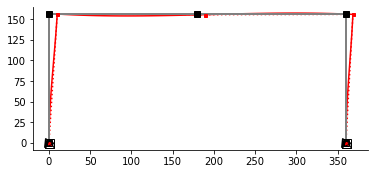
[-7.50191192e-05]], dtype=float64)for i in range(3):
fig, ax = em.plot_displ(model, f(30.*i),scale=1e1)[[-3.73841687e-04]
[-2.39954415e-03]
[ 4.79284214e-06]
[-3.73841687e-04]
[-1.20370370e-03]
[ 7.55794337e-06]
[-3.73841687e-04]
[-7.86325663e-06]
[ 4.79284214e-06]]
[[ 0.50145928]
[ 0.00881571]
[-0.00300476]
[ 0.46230095]
[-0.0288875 ]
[ 0.00124943]
[ 0.42314261]
[-0.01122311]
[-0.00238957]]
[[ 1.00329241]
[ 0.02003096]
[-0.00601432]
[ 0.92497574]
[-0.0565713 ]
[ 0.00249129]
[ 0.84665907]
[-0.02243836]
[-0.00478392]]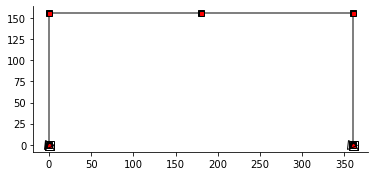
df = anon.diff.jacfwd(f, None, (0,1), squeeze=False)df(20.0)---------------------------------------------------------------------------
IndexError Traceback (most recent call last)
<ipython-input-21-61fb48dc13d3> in <module>
----> 1 df(20.0)
~/pkgs/anon/src/anon/diff.py in jacobian(*args, **kwds)
54 def jacobian(*args,**kwds):
55 f = lu.wrap_init(f_transformed, kwds)
---> 56 f_partial, dyn_args = argnums_partial(f, argnums, args)
57 jax.api.tree_map(partial(jax.api._check_input_dtype_jacfwd, holomorphic), dyn_args)
58 pushfwd = partial(jax.api._jvp, f_partial, dyn_args)
~/extn/jax/jax/api_util.py in argnums_partial(f, dyn_argnums, args)
103 fixed_args = tuple(unit if i in dyn_argnums else wrap_hashably(arg)
104 for i, arg in enumerate(args))
--> 105 dyn_args = tuple(args[i] for i in dyn_argnums)
106 return _argnums_partial(f, dyn_argnums, fixed_args), dyn_args
107
~/extn/jax/jax/api_util.py in <genexpr>(.0)
103 fixed_args = tuple(unit if i in dyn_argnums else wrap_hashably(arg)
104 for i, arg in enumerate(args))
--> 105 dyn_args = tuple(args[i] for i in dyn_argnums)
106 return _argnums_partial(f, dyn_argnums, fixed_args), dyn_args
107
IndexError: tuple index out of rangem